中文

定制机器人零件加工
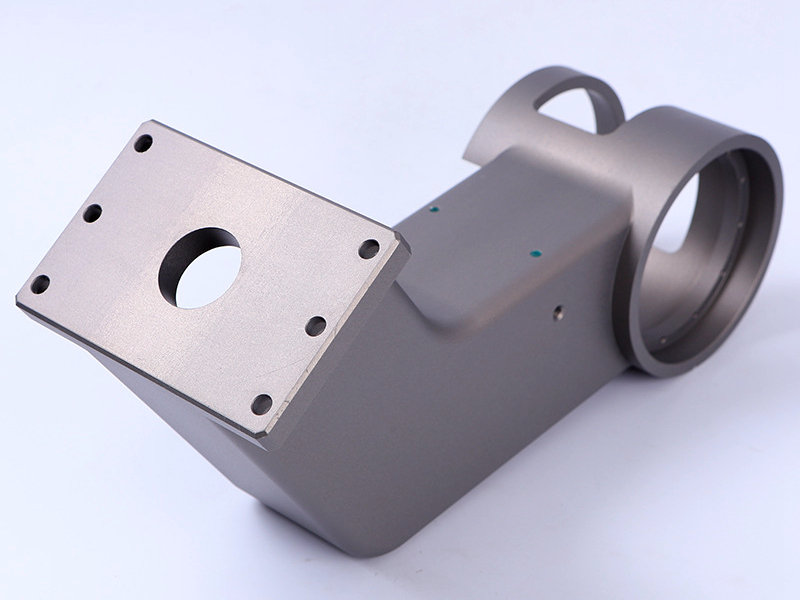
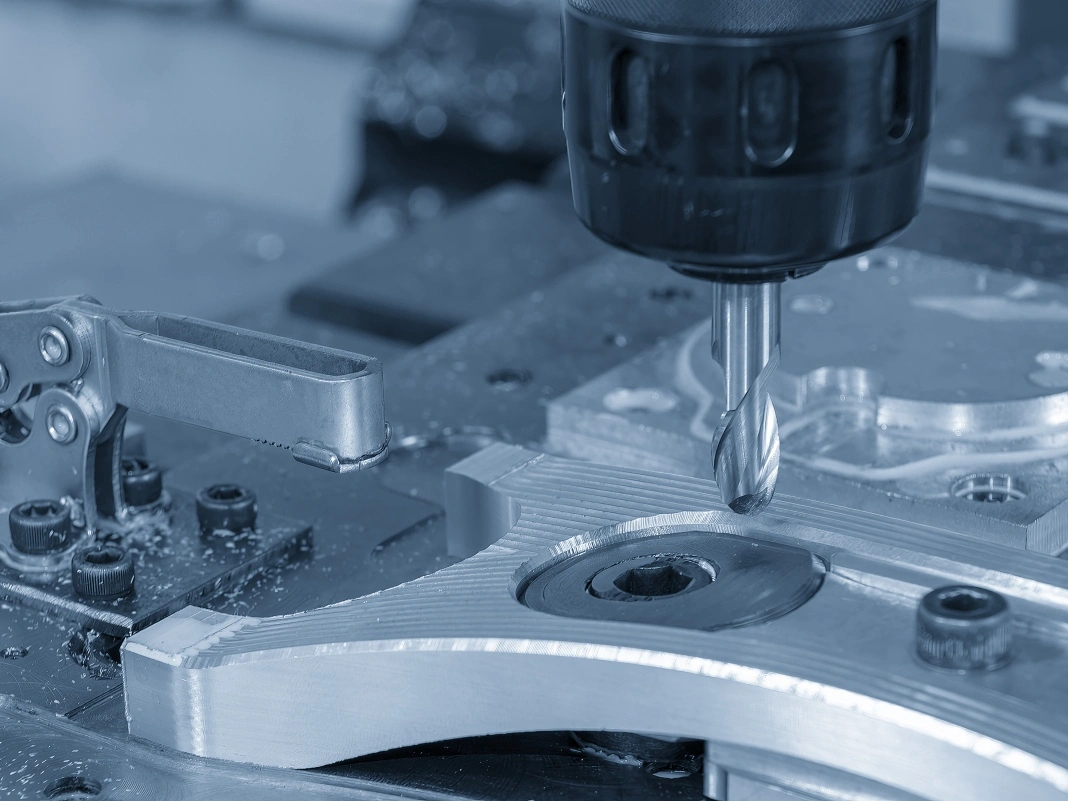
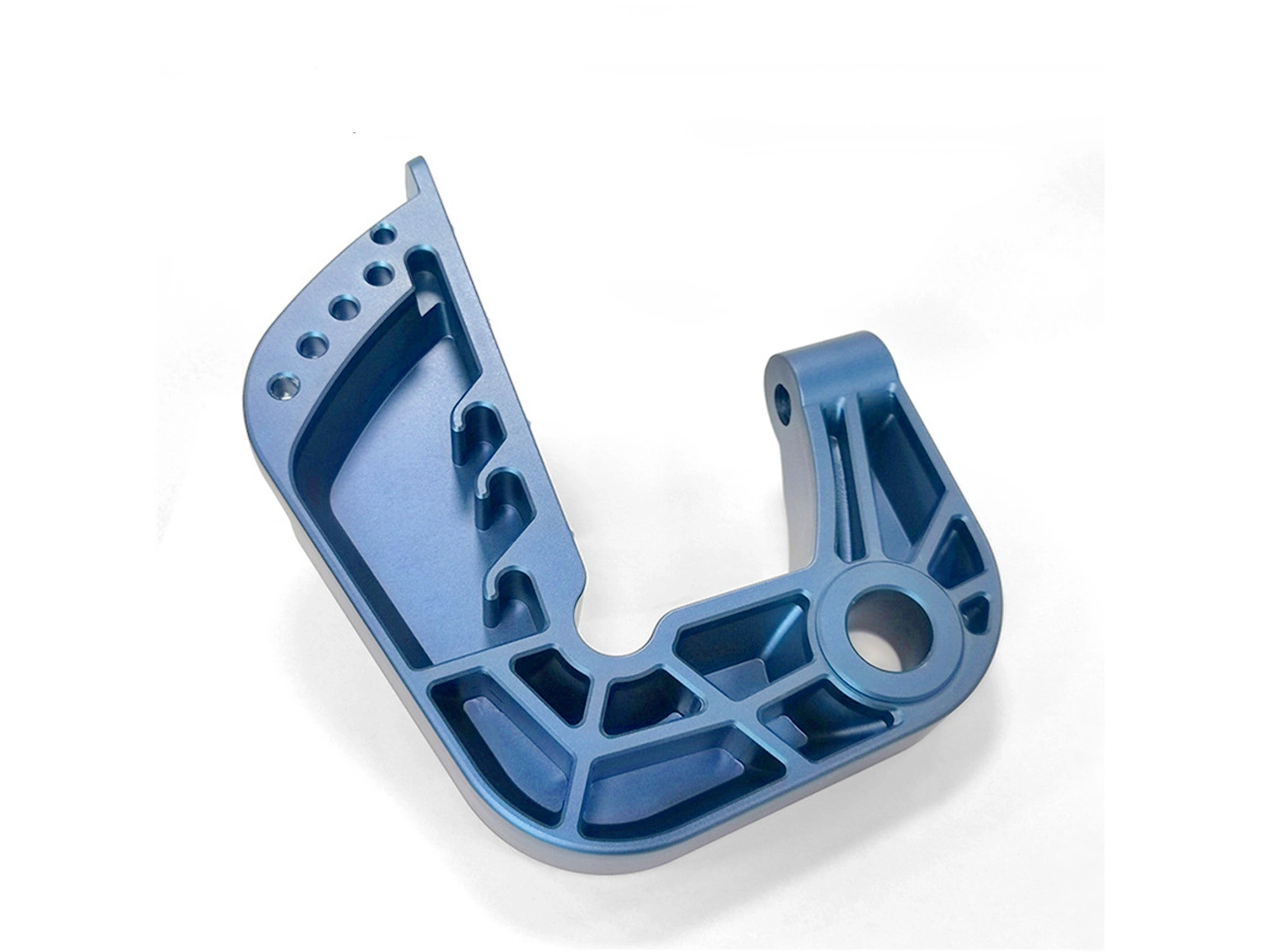
定制机器人零件加工采用精密CNC工艺,如铣削、车削、钻孔和磨削,制造高性能机器人应用零件。利用多轴加工和电火花加工(EDM),生产复杂精确的组件,满足机器人系统严格的规格要求。我们的服务保证机器人零件的可靠性、耐用性及优化功能。
机器人材料选择
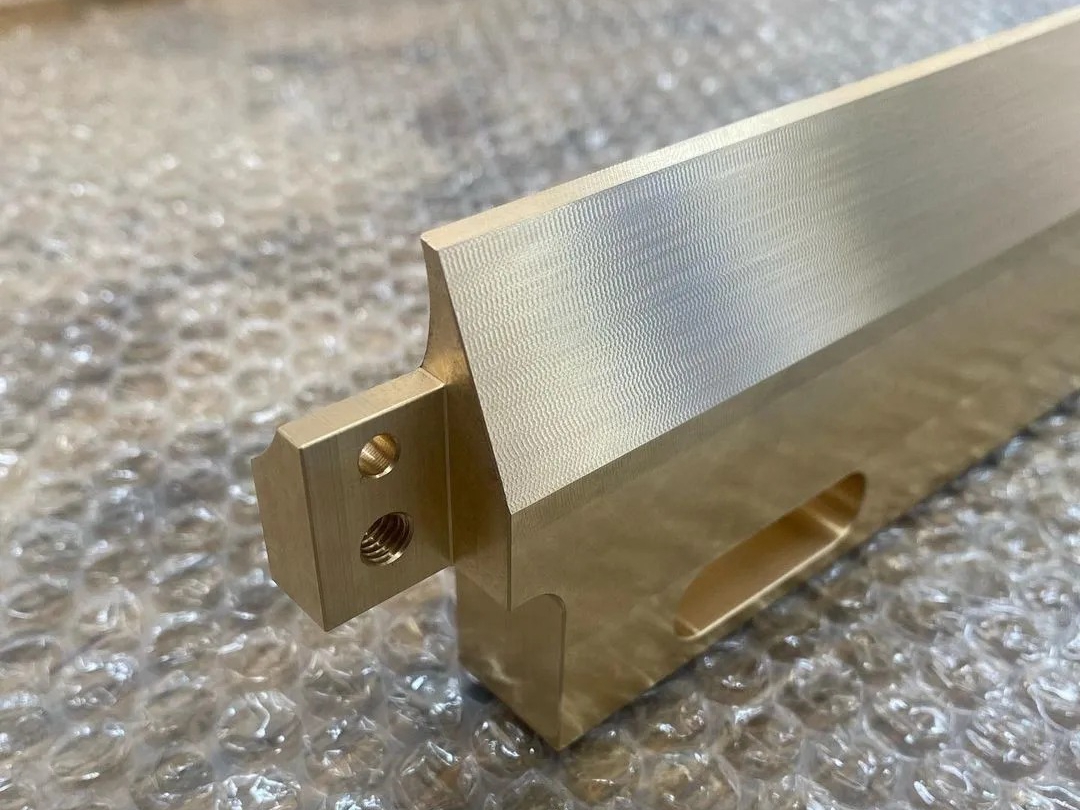
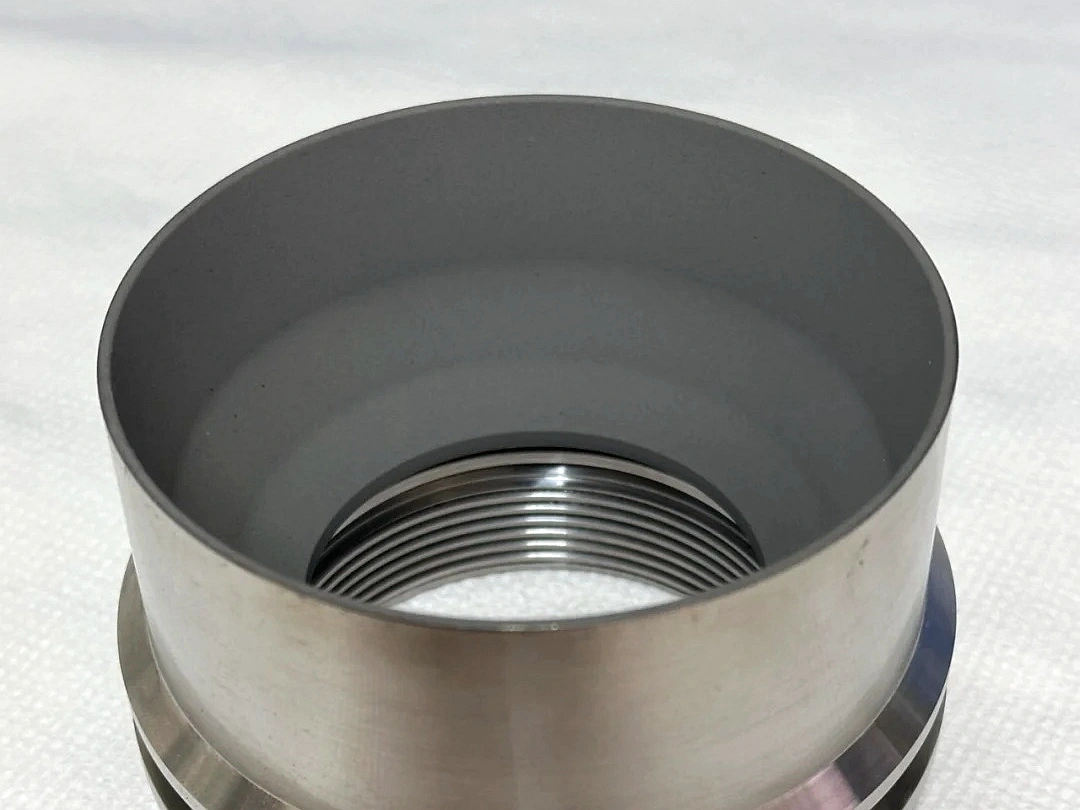
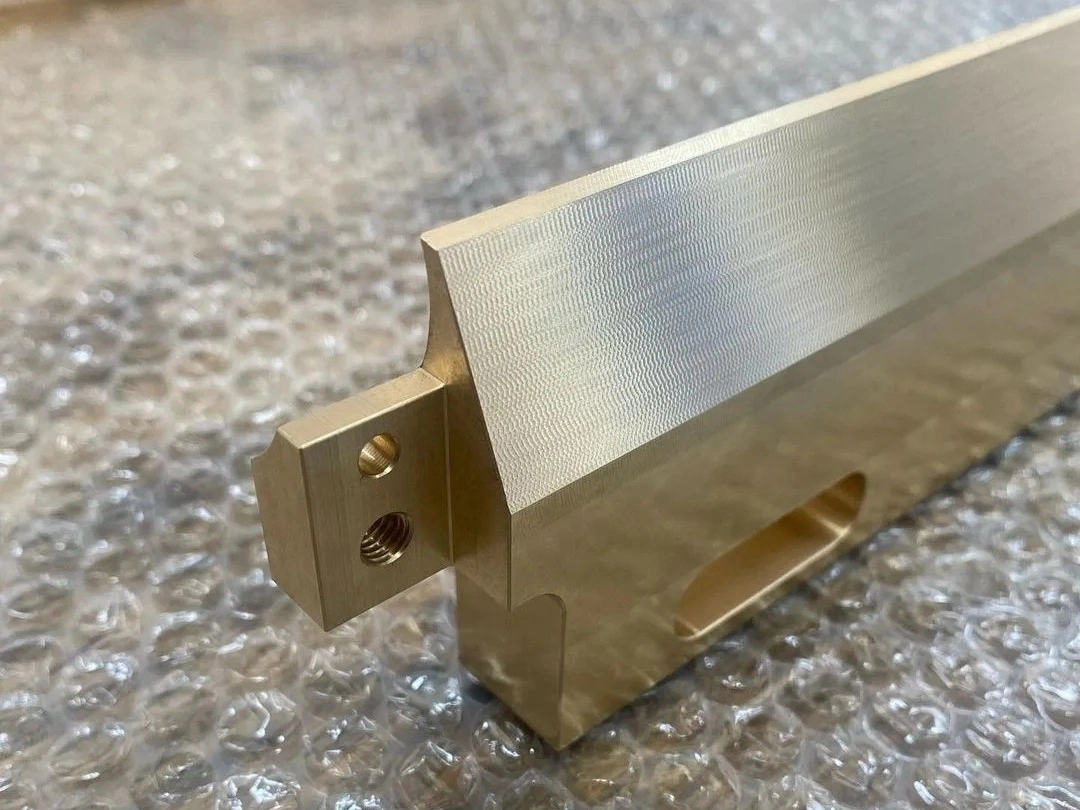
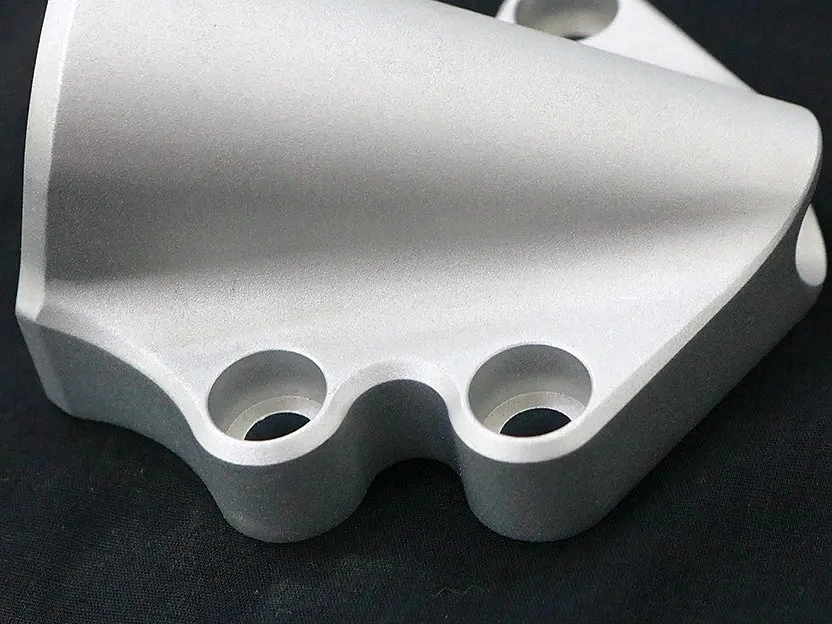
机器人领域常用材料包括超级合金、钛合金、铝、铜、黄铜、青铜、碳钢、不锈钢、塑料和陶瓷,这些材料因其强度轻质、耐用性、耐磨性和导电性而被选用,确保机器人应用中的高性能和精度。
机器人行业表面处理
机器人行业的表面处理提升组件的耐用性、性能及耐磨耐腐蚀性。阳极氧化、电镀、PVD和热障涂层等技术保障零件在极端环境下的保护,而抛光、黑色氧化和喷砂等工艺则提升美观与功能性。这些处理延长机器人部件寿命,确保在苛刻应用中平稳运行。



















机器人CNC加工零件
机器人应用需要高精度,CNC加工提供执行器、齿轮和框架等关键零件,优化工业自动化和机器人系统的性能与精度。








今天就开始一个新项目吧
精密机器人零件制造注意事项
机器人零件的精密制造需要高精度材料、严格公差和先进工程,确保运动平稳高效。此指南阐述制造可靠高性能机器人组件的关键考虑因素。
机器人零件设计指南
机器人零件设计需关注精度、耐用性及性能。本指南阐述制造可靠高效机器人组件的关键工程原则,包括材料、尺寸公差、运动设计和合规性。