العربية
حلول تصنيع الأجزاء المخصصة
خدمة تصنيع مكونات الروبوتات
توفر Neway خدمات تصنيع مكونات الروبوتات باستخدام تشغيل CNC والطباعة ثلاثية الأبعاد والقولبة الفراغية، والصب بالقالب، وحقن القوالب. نوفر قطع دقيقة مصممة للمتانة والأداء في تطبيقات الروبوتات المتقدمة.

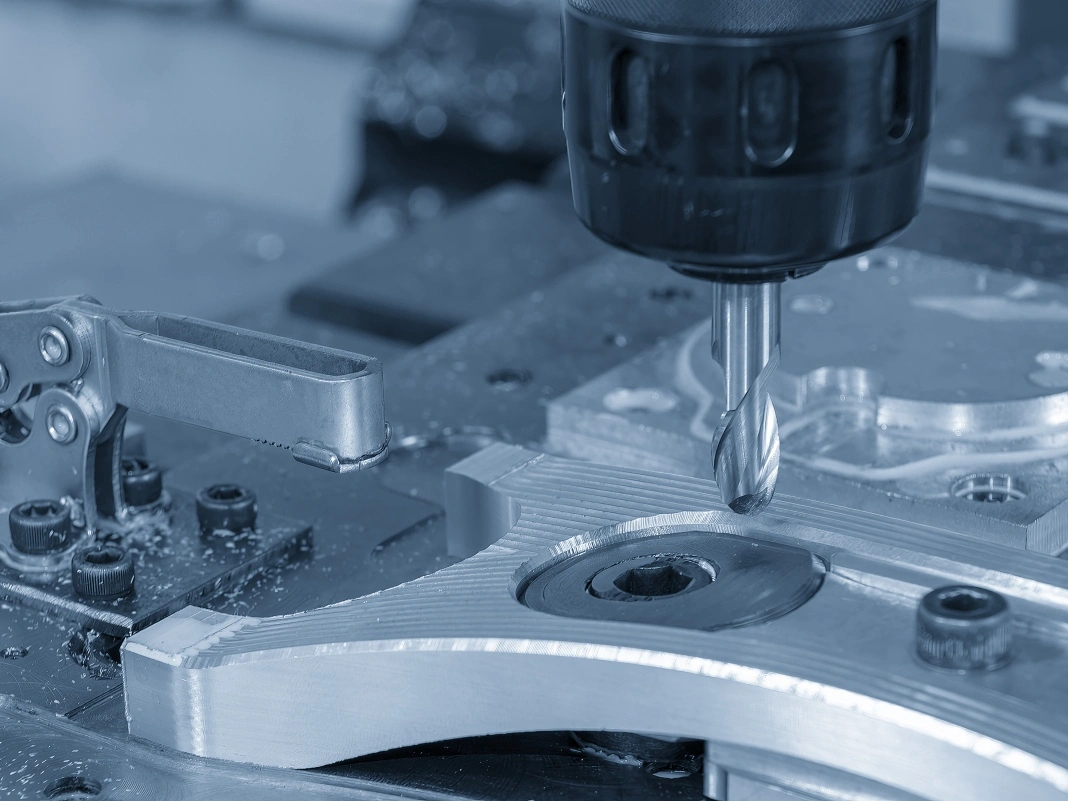
تشغيل قطع الروبوتات المخصصة
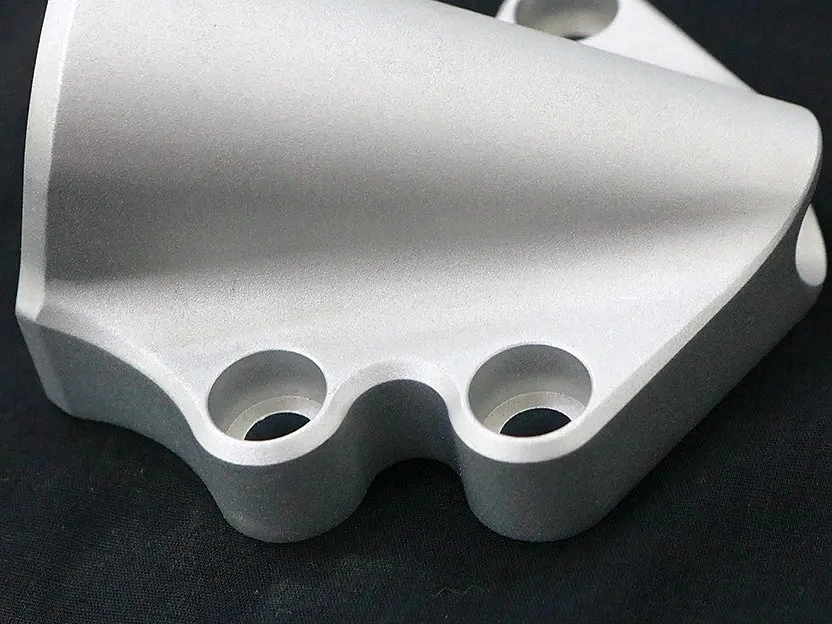
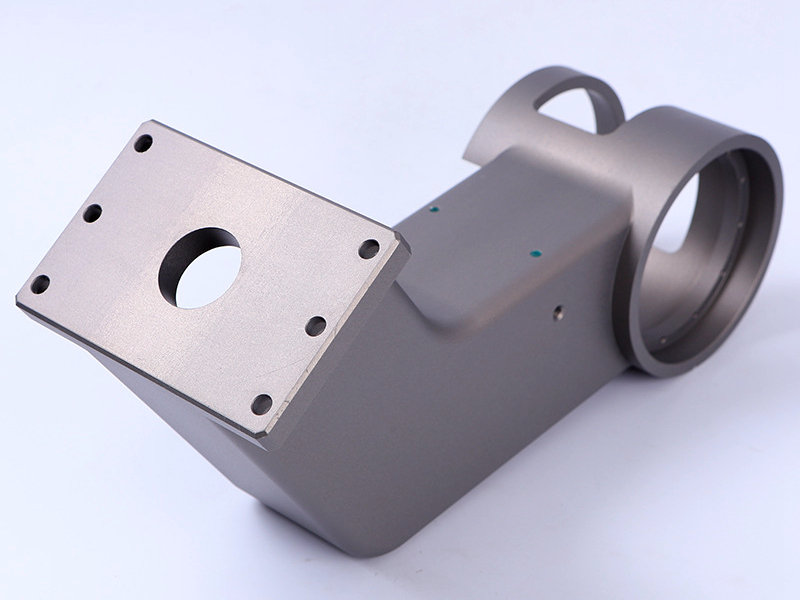
تشغيل قطع الروبوتات المخصصة يتضمن عمليات CNC دقيقة مثل التفريز، الخراطة، الحفر، والطحن لإنتاج قطع عالية الأداء لتطبيقات الروبوتات. باستخدام التشغيل متعدد المحاور وتشغيل التفريغ الكهربائي (EDM)، ننتج مكونات معقدة ودقيقة تلبي المواصفات الصارمة لأنظمة الروبوتات. خدماتنا تضمن الاعتمادية والمتانة والأداء الأمثل لتقنيات الروبوت الحديثة.
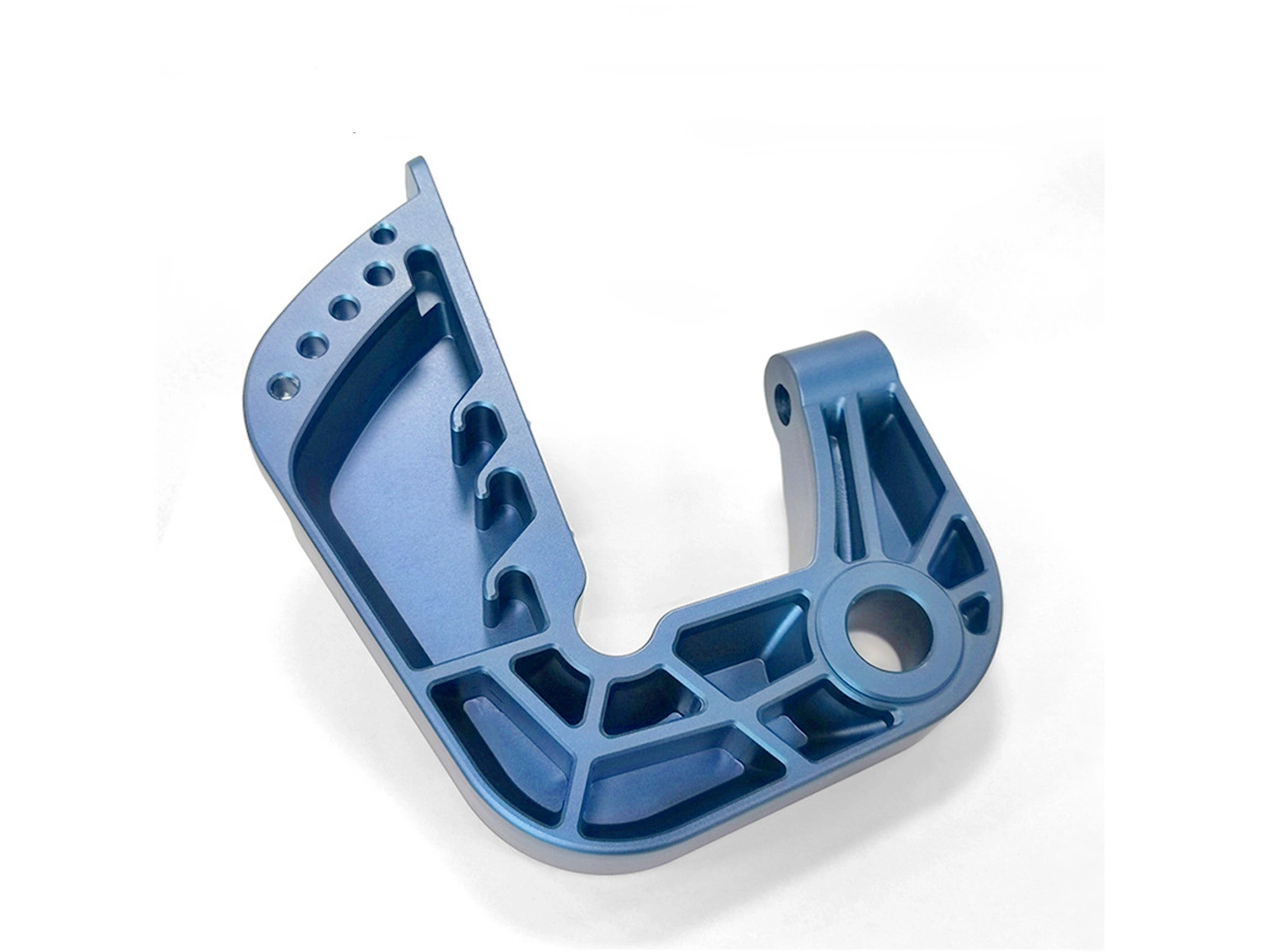
اختيار مواد الروبوتات
تُختار مواد مثل السبائك الفائقة، التيتانيوم، الألمنيوم، النحاس، النحاس الأصفر، البرونز، الصلب الكربوني، الصلب المقاوم للصدأ، البلاستيك، والسيراميك للروبوتات بسبب قوتها، وخفة وزنها، ومتانتها، ومقاومتها للتآكل، وموصلية الكهرباء، لضمان أداء ودقة عالية في تطبيقات الروبوتات.
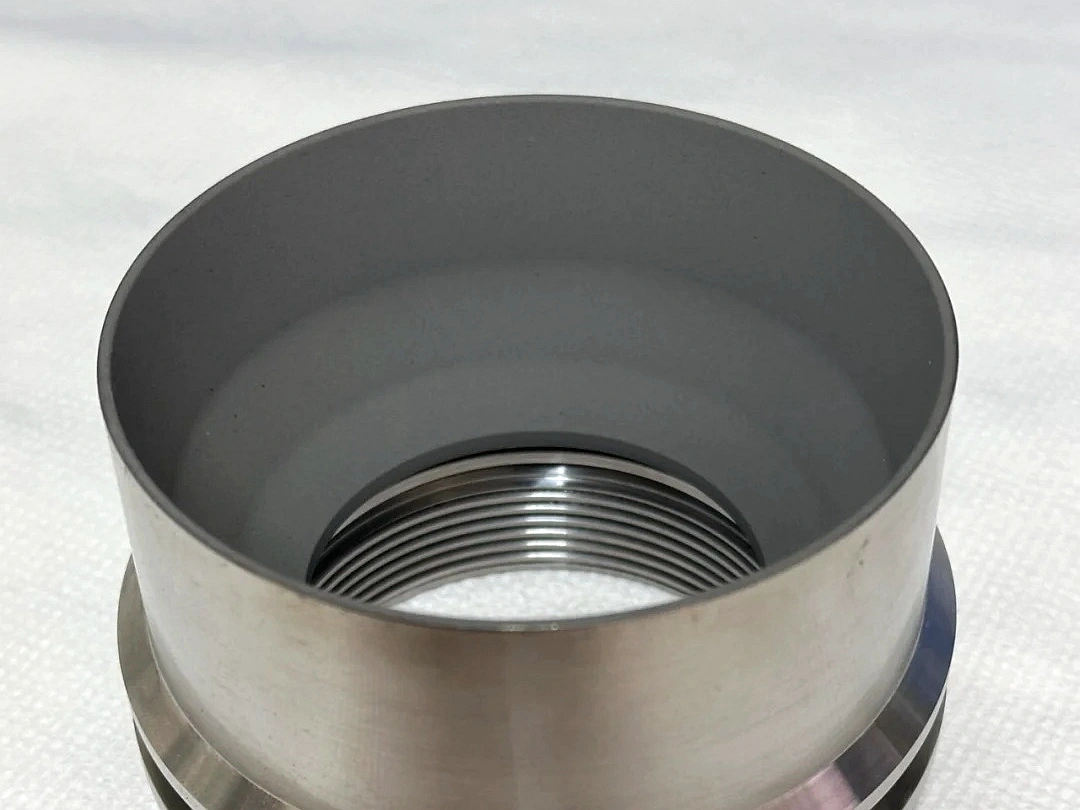
معالجة الأسطح لصناعة الروبوتات
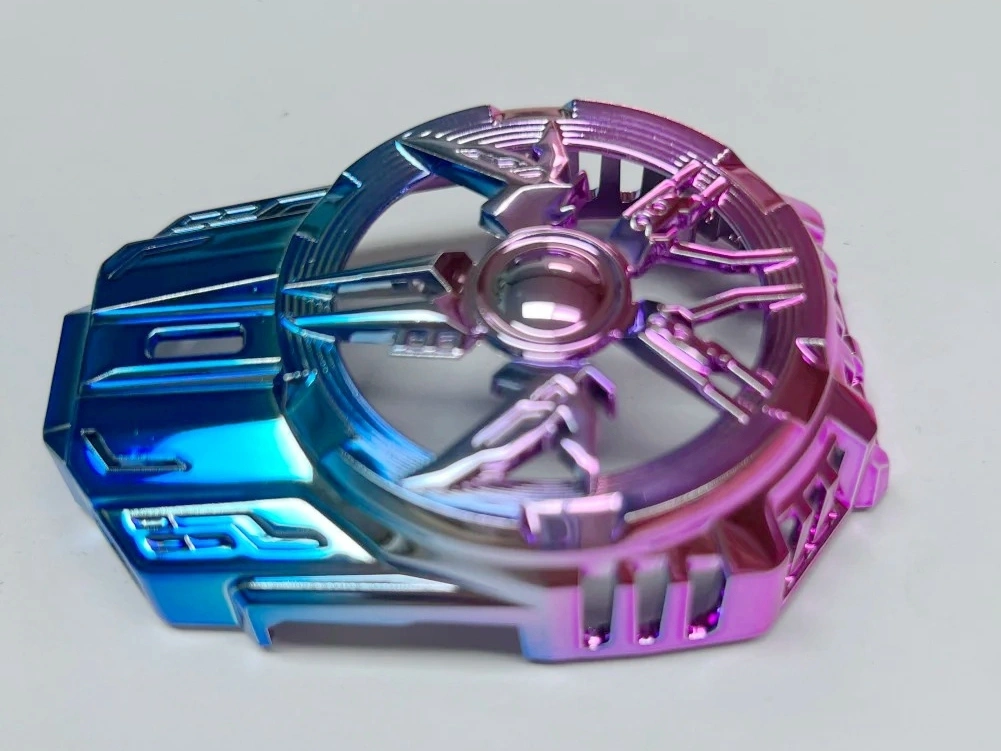
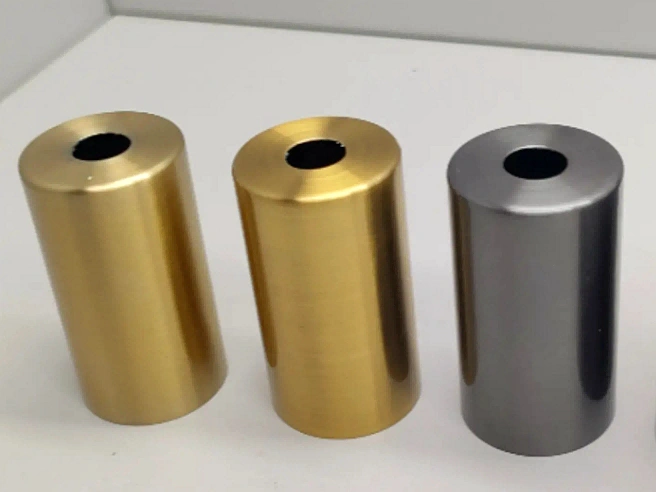
تحسن معالجة الأسطح في صناعة الروبوتات من متانة المكونات وأدائها ومقاومتها للتآكل والاحتكاك. تقنيات مثل الأنودة، الطلاء الكهربائي، الترسيب الفيزيائي بالبخار (PVD)، وطلاءات الحواجز الحرارية توفر حماية ضد البيئات القاسية، بينما تحسن عمليات مثل التلميع، الأكسيد الأسود، والرملية من الجماليات والوظائف. تمد هذه المعالجات عمر قطع الروبوتات، مما يضمن تشغيلًا سلسًا في التطبيقات المتطلبة.
اعرف المزيد
طلاء حراري
اعرف المزيد
تشطيب كما هو مشغل

اعرف المزيد
الطلاء

اعرف المزيد
الترسيب الفيزيائي بالبخار (PVD)
اعرف المزيد
الرمل النفاث
اعرف المزيد
الطلاء الكهربائي

اعرف المزيد
التلميع

اعرف المزيد
الأنودة

اعرف المزيد
الطلاء البودري

اعرف المزيد
التلميع الكهربائي

اعرف المزيد
التمويه

اعرف المزيد
التلميع بالفرشاة

اعرف المزيد
أكسيد أسود

اعرف المزيد
المعالجة الحرارية

اعرف المزيد
طلاء الحاجز الحراري (TBC)

اعرف المزيد
التلميع بالتدحرج
اعرف المزيد
طلاء Alodine

اعرف المزيد
الطلاء الكرومي

اعرف المزيد
التفليس الفسفاتي

اعرف المزيد
التنظيف النيتروجيني

اعرف المزيد
الطلاء بالغمس الساخن (الجلفنة)

اعرف المزيد
الطلاء بالأشعة فوق البنفسجية

اعرف المزيد
طلاء الورنيش

اعرف المزيد
طلاء تفلون
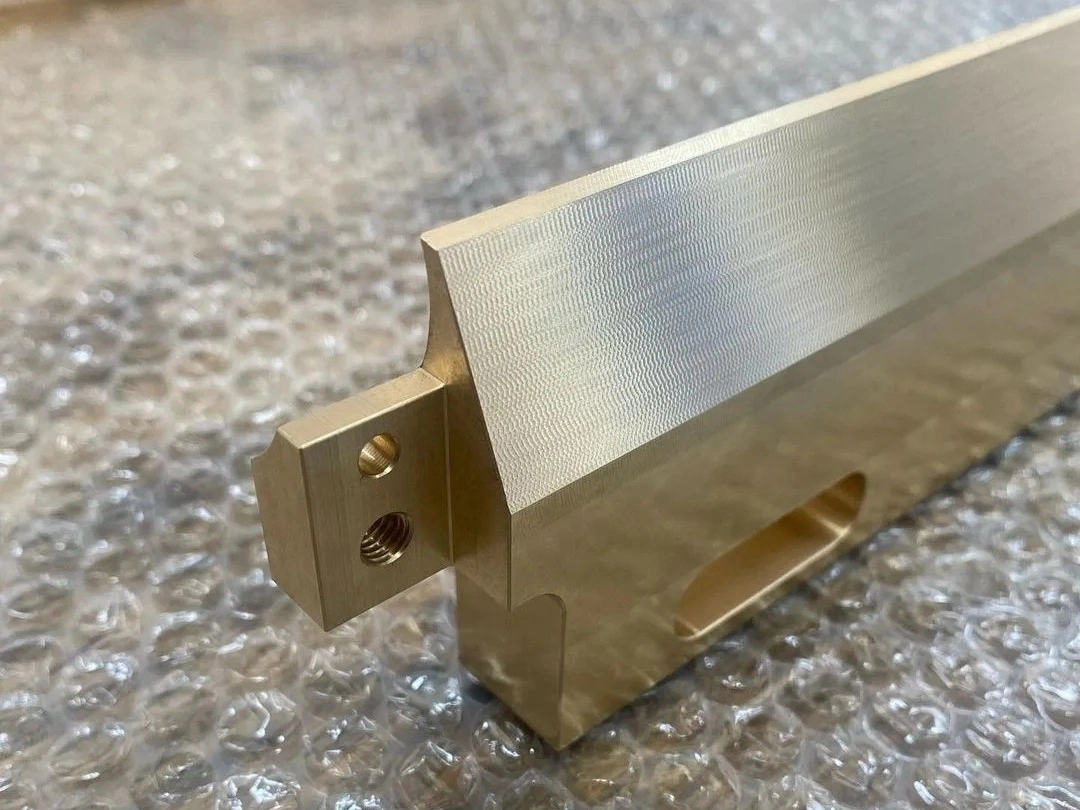
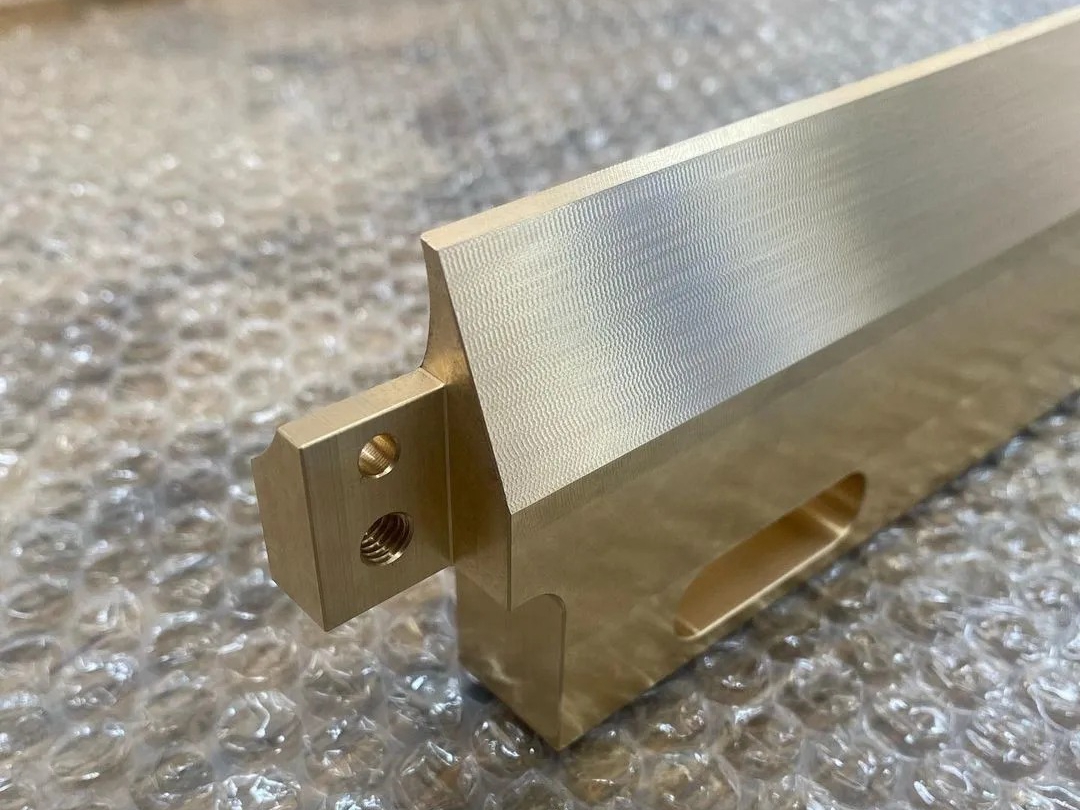
قطع تشغيل CNC لصناعة الروبوتات
تتطلب تطبيقات الروبوتات دقة عالية، ويوفر تشغيل CNC مكونات رئيسية مثل المشغلات والتروس والهياكل، مما يحسن الأداء والدقة لأتمتة الصناعة وأنظمة الروبوت.








لنبدأ مشروعًا جديدًا اليوم
الاعتبارات في تصنيع قطع الروبوتات الدقيقة
يتطلب تصنيع قطع الروبوتات الدقيقة مواد عالية الدقة، تحكمًا صارمًا في الأبعاد، وهندسة متقدمة لضمان حركة سلسة وفعالة. يوضح هذا الدليل الاعتبارات الأساسية في التصنيع لإنشاء مكونات روبوتية موثوقة وعالية الأداء.
دليل تصميم أجزاء الروبوتات
يتطلب تصميم أجزاء الروبوتات الدقة والمتانة والأداء. يوضح هذا الدليل المبادئ الهندسية الرئيسية لإنشاء مكونات روبوتية موثوقة وفعالة، بما في ذلك المواد، والتحكم في الأبعاد، وتصميم الحركة، والامتثال.
Frequently Asked Questions
استكشف الموارد ذات الصلة

شركة Neway Precision Works Ltd.
رقم 3 طريق لفوشان الصناعي الغربي
فينغغانغ، دونغقوان، الصين
الرمز البريدي 523000
الحلول
Copyright © 2026 Machining Precision Works Ltd.All Rights Reserved.