English
Custom Parts Manufacturing Solutions
Robotics Components Manufacturing Service
Neway offers Robotics Components Manufacturing, utilizing CNC Machining, 3D Printing, Vacuum Casting, Die Casting, and Injection Molding. We deliver precision parts designed for durability and performance in advanced robotics applications.

Custom Robotics Parts Machining
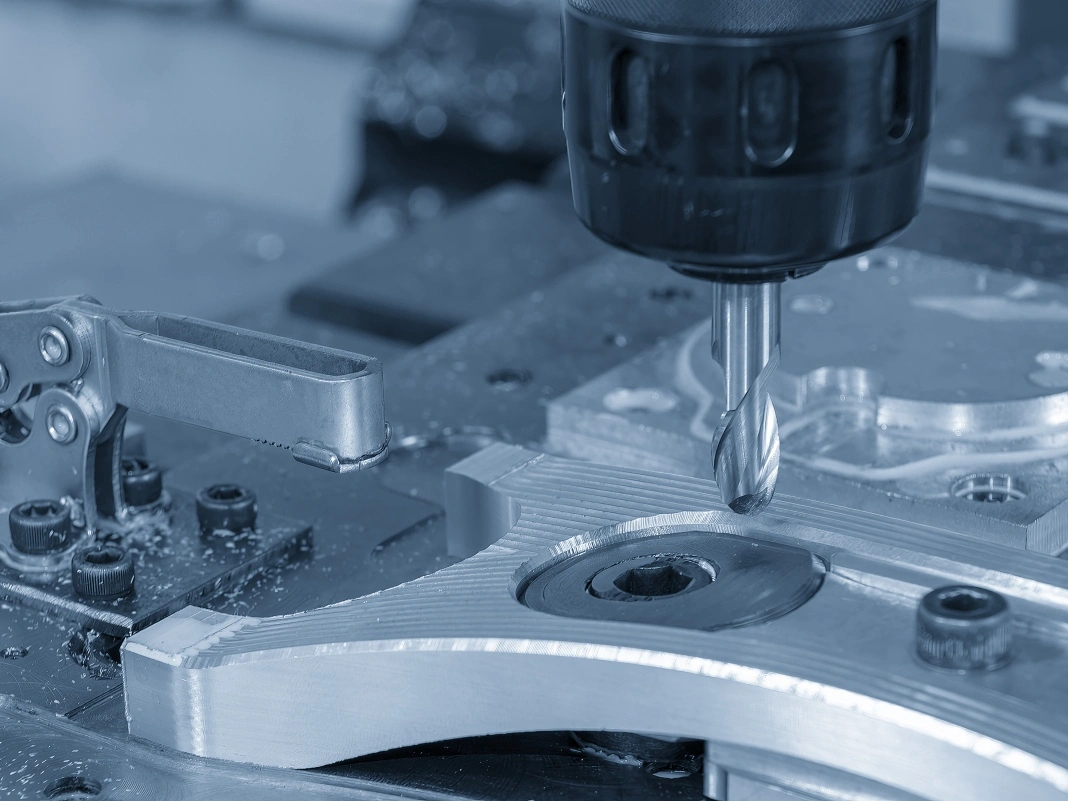
Custom Robotics Parts Machining involves precision CNC processes like milling, turning, drilling, and grinding to create high-performance parts for robotics applications. Utilizing multi-axis machining and electrical discharge machining (EDM), we produce complex, accurate components tailored to meet the demanding specifications of robotic systems. Our services ensure reliability, durability, and optimized functionality for cutting-edge robotics.
Robotics Material Selection
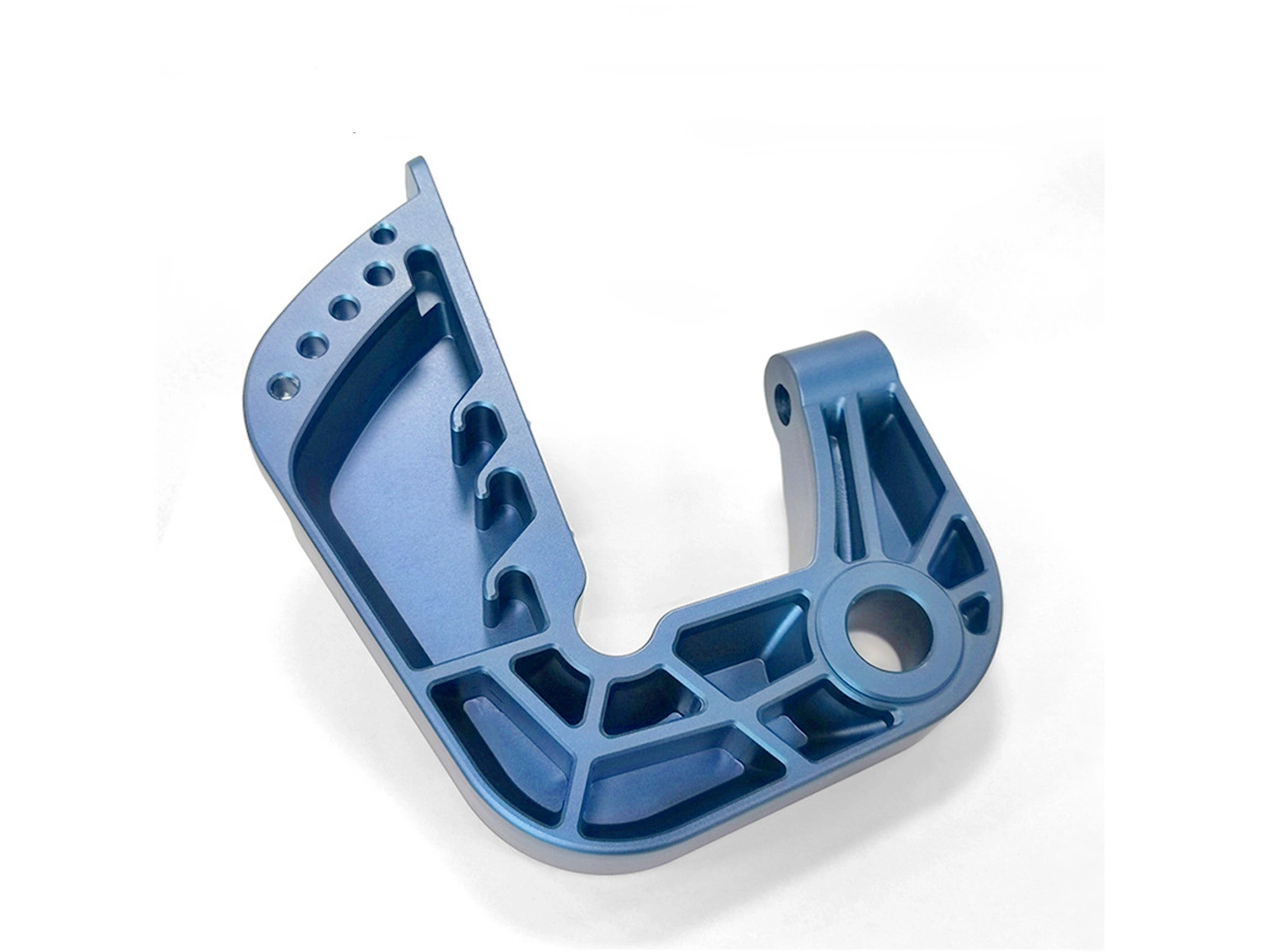
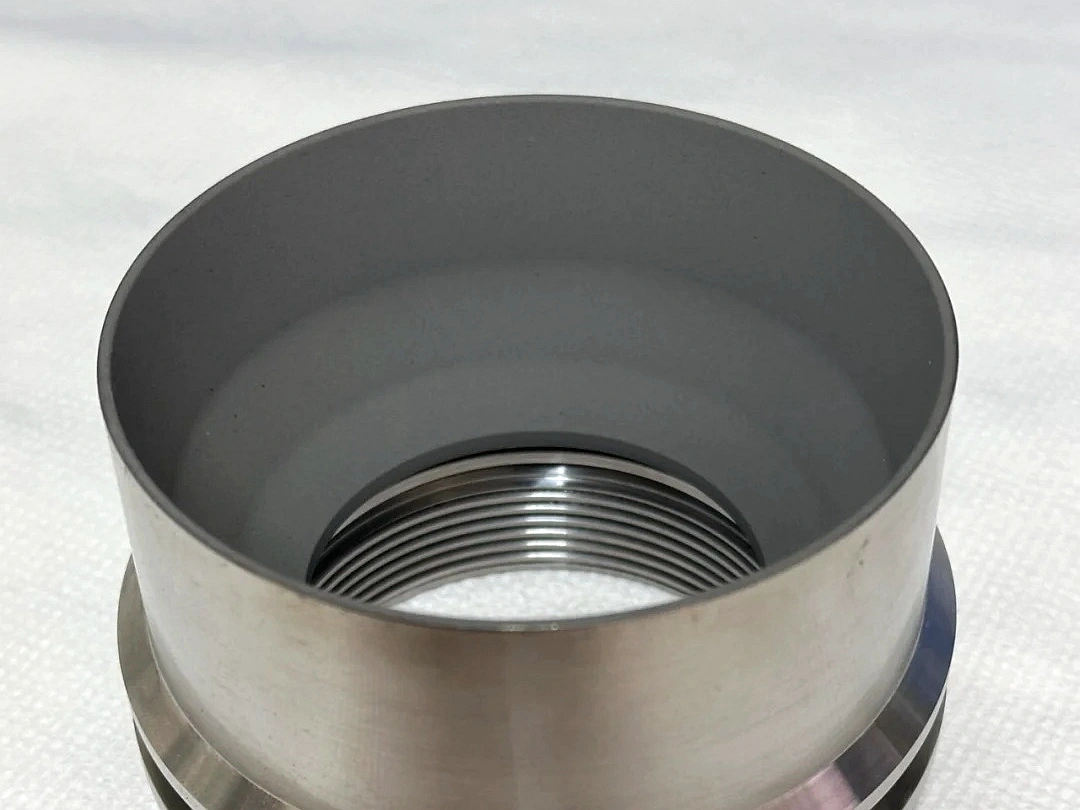
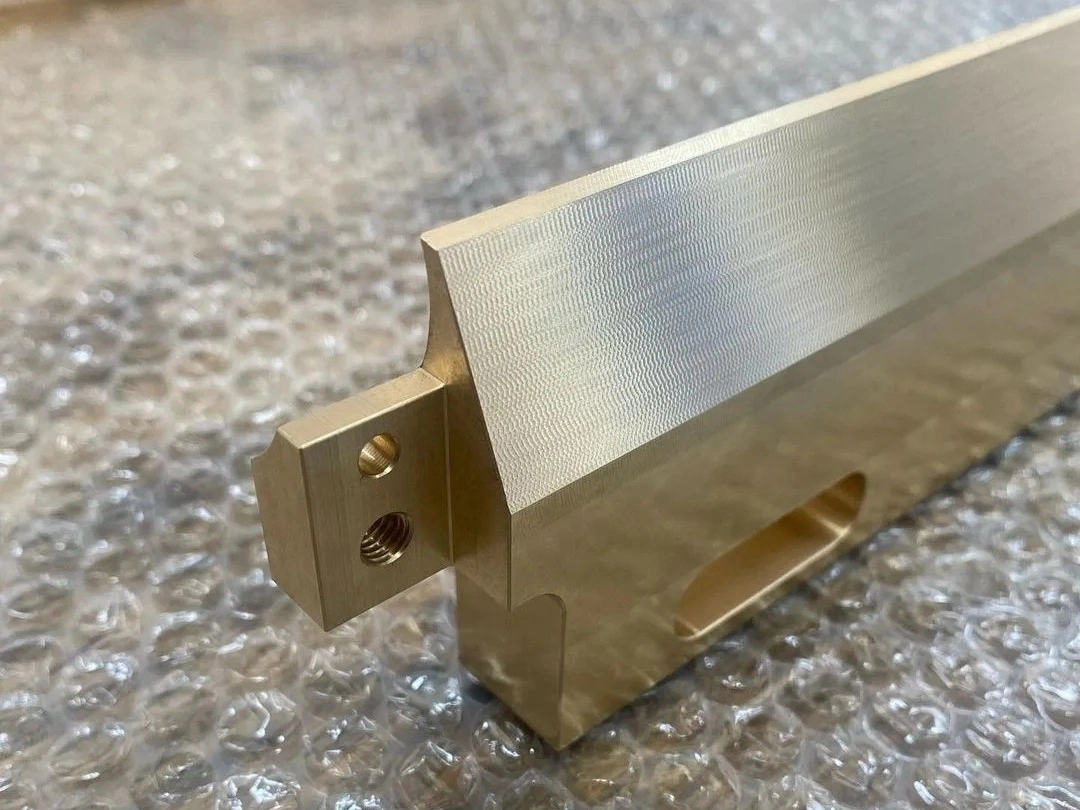
Materials such as superalloy, titanium, aluminum, copper, brass, bronze, carbon steel, stainless steel, plastic, and ceramic are selected for robotics due to their strength, lightweight nature, durability, wear resistance, and electrical conductivity, ensuring high performance and precision in robotic applications.
Surface Treatment for Robotics Industry
Surface treatments in the robotics industry enhance component durability, performance, and resistance to wear and corrosion. Techniques like anodizing, electroplating, PVD, and thermal barrier coatings ensure protection against extreme environments, while processes like polishing, black oxide, and sandblasting improve aesthetics and functionality. These treatments extend the lifespan of robotic parts, ensuring smooth operation in demanding applications.
Learn More
Thermal Coating
Learn More
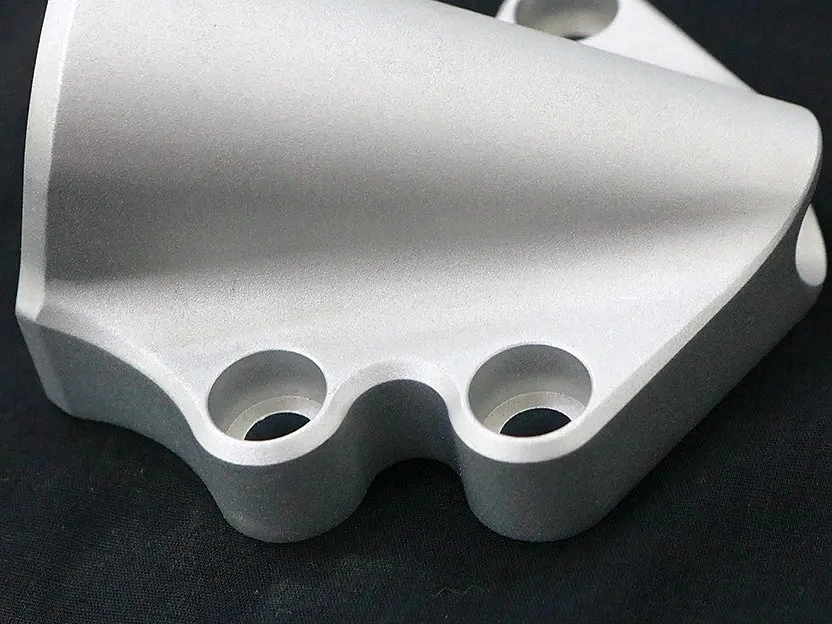
As Machined

Learn More
Painting

Learn More
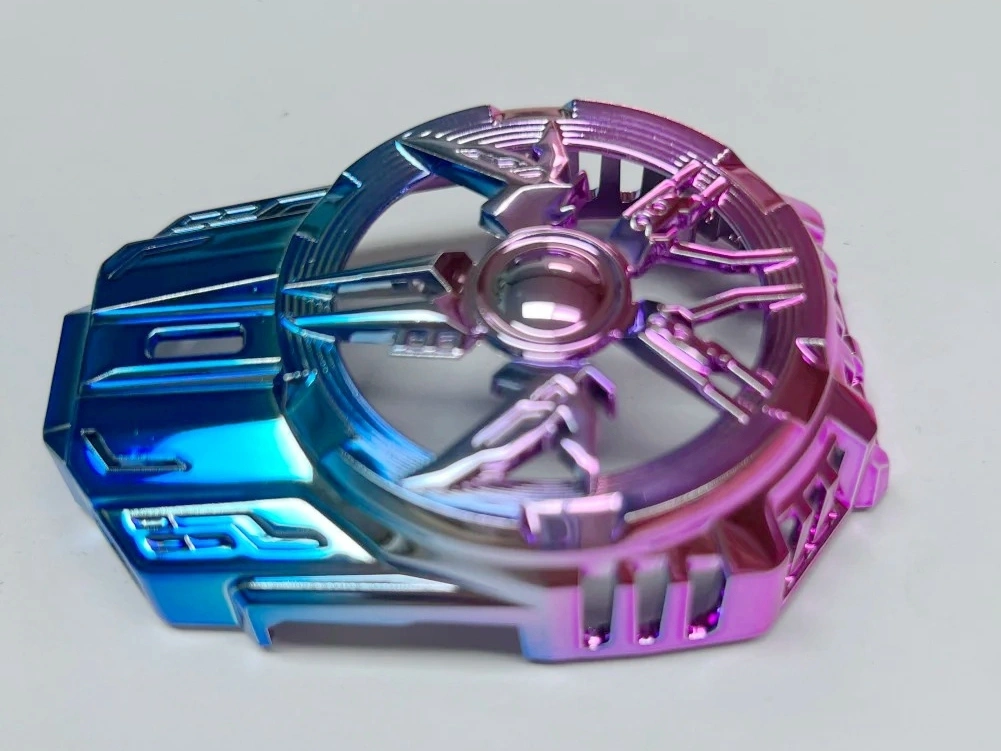
PVD (Physical Vapor Deposition)
Learn More
Sandblasting
Learn More
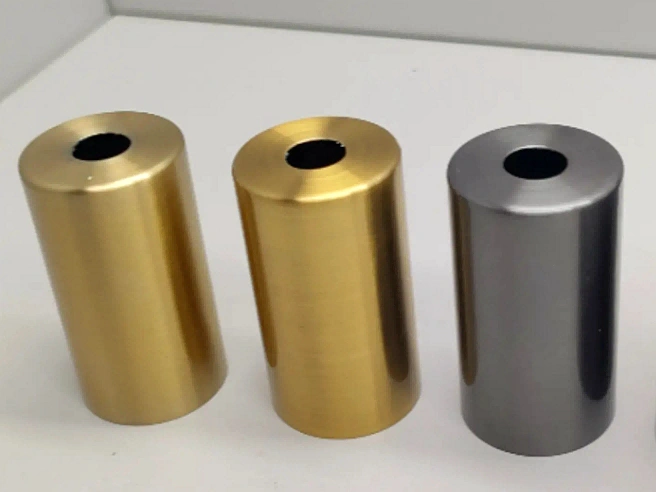
Electroplating

Learn More
Polishing

Learn More
Anodizing

Learn More
Powder Coating

Learn More
Electropolishing

Learn More
Passivation

Learn More
Brushing

Learn More
Black Oxide

Learn More
Heat Treatment

Learn More
Thermal Barrier Coating (TBC)

Learn More
Tumbling
Learn More
Alodine

Learn More
Chrome Plating

Learn More
Phosphating

Learn More
Nitriding

Learn More
Galvanizing

Learn More
UV Coating

Learn More
Lacquer Coating

Learn More
Teflon Coating
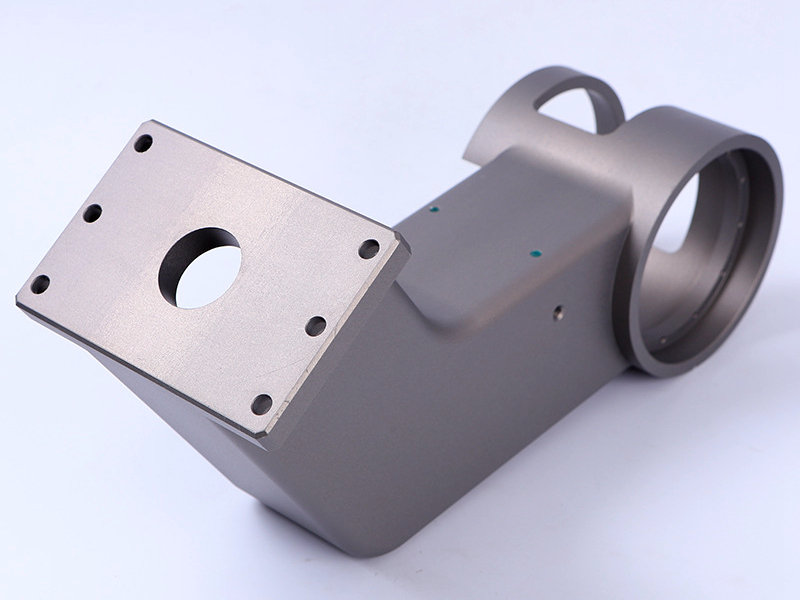
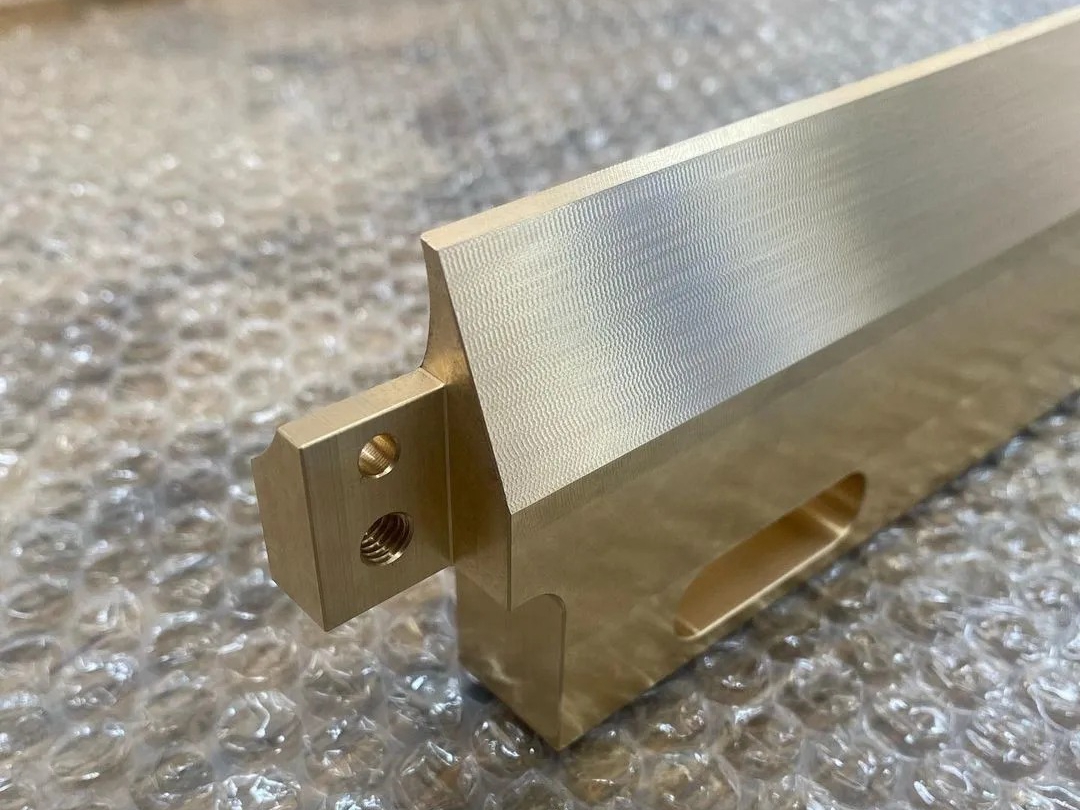
CNC Machined Parts for Robotics
Robotics applications demand precision, and CNC machining delivers key components like actuators, gears, and frames, optimizing performance and accuracy for industrial automation and robotic systems.








Let's Start A New Project Today
Precision Robotics Parts Manufacturing Considerations
Precision manufacturing of robotics parts requires high-accuracy materials, tight tolerances, and advanced engineering to ensure smooth and efficient movement. This guide outlines essential manufacturing considerations for creating reliable and high-performance robotic components.
Guide to Robotics Parts Design
Designing parts for robotics requires precision, durability, and performance. This guide outlines key engineering principles for creating reliable and efficient robotic components, including materials, tolerances, motion design, and compliance.
Frequently Asked Questions
Explore Related Resources

Neway Precision Works Ltd.
No.3 Lefushan Industry West Road
Fenggang, Dongguan, China
ZIP 523000
Solutions
Copyright © 2026 Machining Precision Works Ltd.All Rights Reserved.